1. Motor Servo
Motor Servo adalah aktuator berpresisi tinggi yang mengubah sinyal kontrol (biasanya PWM) menjadi pergerakan sudut atau posisi mekanis tertentu. Motor servo umumnya terdiri dari motor DC kecil, rangkaian pengendali elektronik, gearbox, dan potensiometer umpan balik. Saat menerima pulsa PWM, pengendali membandingkan durasi pulsa dengan posisi potensiometer, lalu menggerakkan motor hingga mencapai sudut yang sesuai.
Contoh umum dari tipe-tipe motor servo, seperti:
- Micro Servo (SG90, MG90S) dengan sudut ~0–180°, torsi rendah (~1–2 kg·cm), biasanay untuk robotika mini atau model pesawat.
- Standard Servo (MG995, MG996R) memiliki torsi sedang (~7–15 kg·cm), cocok robot kecil, kendali pintu.
- High-Torque / Metal Gear memiliki torsi tinggi (>20 kg·cm), gearbox metal untuk beban lebih berat atau aplikasi industri ringan
- Continuous Rotation Servo: diubah agar berputar tanpa batas (360°+) dengan kontrol kecepatan, bukan sudut.

Gambar 1. Contoh Motor Servo
2. Motor Stepper
Motor stepper adalah aktuator elektromekanik yang bergerak dalam langkah-langkah diskrit (step) dengan sudut rotasi tetap setiap pulsa listrik, memungkinkan kontrol posisi dan kecepatan yang sangat presisi tanpa umpan balik posisi. Prinsip kerjanya memanfaatkan kumparan stator berfase, biasanya dua atau lebih yang diberi arus bergantian melalui driver, sehingga rotor magnet permanen atau reluctance bergeser untuk menyelaraskan medan magnet tiap kumparan. Ada dua jenis utama: bipolar, dengan dua kumparan besar dan arus dibalik polaritasnya untuk tiap fase; serta unipolar, yang memiliki kumparan tengah dengan titik tengah sehingga pengaliran arus lebih sederhana. Keunggulannya meliputi kontrol sudut yang akurat (misal 1,8° per langkah), torsi rendah pada kecepatan tinggi, dan operasi open-loop tanpa encoder. Namun, kelemahannya adalah resonansi mekanis pada kecepatan tertentu, torsi menurun pada kecepatan tinggi, serta konsumsi daya yang relatif konstan meski beban statis. Motor stepper banyak dipakai di printer 3D, CNC, kamera pan-tilt, dan robotika.
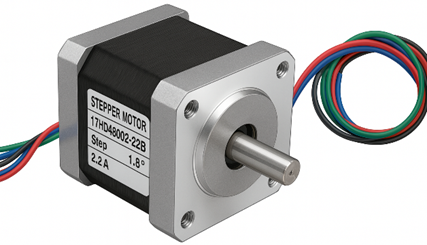
Gambar 2. Contoh Motor Stepper
3. Selenoid
Solenoid adalah aktuator elektromagnetik yang terdiri dari gulungan kawat berisolasi (coil) di dalam inti logam berbentuk tabung; ketika dialiri arus listrik, coil akan menghasilkan medan magnet yang menarik atau mendorong plunger (inti besi bergerak) di dalamnya, mengubah energi listrik menjadi gerakan linier. Dengan konstruksinya yang sederhana dan responsnya cepat, solenoid banyak dipakai untuk menggerakkan katup, kunci elektromagnetik, switch, atau mekanisme pintu otomatis dalam beragam aplikasi industri dan otomasi. Berikut beberapa jenis solenoid yang umum digunakan beserta karakteristik utamanya
- Solenoid Linear (Push/Pull): Menghasilkan gerakan maju–mundur (linier) plunger. Tipe push mendorong plunger ke luar saat di-energize, tipe pull menariknya ke dalam. Banyak dipakai di katup dan aktuator pintu otomatis.
- Solenoid Latching: Memiliki dua posisi stabil: satu saat diberi pulsa arus satu arah, satu lagi saat diberi pulsa arus berlawanan. Setelah berpindah posisi, ia akan mengunci tanpa perlu arus berkelanjutan (hemat daya). Cocok untuk aplikasi yang hanya sesekali berganti posisi, misal relay listrik dan klep on/off low-power.
- Solenoid Rotary: Mengubah medan magnet menjadi gerakan putar (rotasi) plunger atau armatur. Biasanya menghasilkan sudut putar terbatas (misalnya. ±90°). Digunakan pada pengunci pintu elektronik dan katup putar (butterfly valve) ukuran kecil.
- Solenoid Proportional: Mengatur gaya tarikan atau dorongan plunger secara proporsional terhadap arus listrik. Memberi kontrol posisi atau gaya secara variabel, bukan hanya on/off. Umum di katup kontrol fluida dan sistem suspensi mobil.
- Solenoid Hidrolik/Pneumatik (Pilot-Operated): Solenoid kecil menggerakkan spool pilot, kemudian tekanan fluida (udara atau minyak) memindahkan katup utama. Dapat mengendalikan aliran bertekanan tinggi dengan konsumsi daya solenoid rendah. Dipakai di sistem kontrol industri dan otomasi pabrik.
- Solenoid Tubular dan Pancake: Tubular memiliki elemen coil berbentuk tabung dengan plunger di dalamnya. Pancake (Flat) terdiri coil datar dan lebar, menghasilkan gaya lebih besar pada stroke pendek, ideal untuk ruang terbatas (misalnya. printer, disk brake).
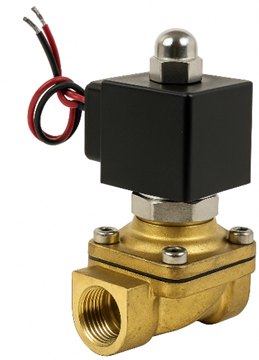
Gambar 3. Contoh Selenoid Valve (Solenoid Linear)
4. Relay elektromagnetik
Relay Elektromagnetik adalah saklar elektronik yang dioperasikan secara elektromagnetik untuk mengalihkan beban listrik, memungkinkan rangkaian bertegangan rendah mengendalikan arus atau tegangan yang jauh lebih tinggi secara aman. Komponen utamanya terdiri dari kumparan (coil), yaitu gulungan kawat berisolasi yang saat dialiri arus akan membentuk medan magnet; inti besi lunak (armature), sebuah elemen besi yang dapat bergerak dan tertarik ke kumparan ketika termagnetisasi; kontak (contacts), yaitu pasangan saklar biasanya satu set normally closed (NC) dan/atau normally open (NO) yang berpindah posisi mengikuti pergerakan armature; serta pegas pemulih (spring) yang akan mengembalikan armature dan kontak ke posisi awal ketika arus pada kumparan diputus. Relay elektromagnetik tersedia dalam beberapa konfigurasi kontak, antara lain Form A (SPST NO) dengan satu kontak normally open (NO) yang menutup ketika kumparan dialiri arus listrik; Form B (SPST NC) dengan satu kontak normally closed (NC) yang membuka ketika kumparan dialiri arus listrik; Form C (SPDT) yang memiliki satu kontak common (COM) serta satu NO dan satu NC sehingga dapat berpindah antara dua jalur; serta varian multi-pole seperti DPDT atau 4PDT yang menyediakan beberapa pole untuk mengendalikan beberapa sirkuit secara bersamaan.

Gambar 4. Contoh Relay (DPDT)
5. Aktuator linier
Aktuator Linier adalah perangkat mekanis yang mengubah energi (listrik, hidraulik, atau pneumatik) menjadi gerakan lurus (linear) untuk mendorong atau menarik beban. Aktuator linier dapat digerakkan secara listrik, hidraulik, atau pneumatik: pada tipe listrik, motor putar (DC atau stepper) memutar sekrup bola atau trapezoidal sehingga mur pada batang penggerak meluncur maju–mundur sepanjang ulir untuk menghasilkan gerakan lurus; pada tipe hidraulik, tekanan fluida yang dipompa ke dalam silinder mendorong piston keluar atau menariknya masuk membentuk gerakan linier berdaya tinggi; sedangkan pada tipe pneumatik, prinsipnya sama dengan hidraulik tetapi menggunakan udara bertekanan sehingga respons lebih cepat meski torsi cenderung lebih rendah.

Gambar 5. Contoh Aktuator Linear